Comet Exoskeleton Locomotor Control Systems Laboratory April 2015 - October 2016
Project Description
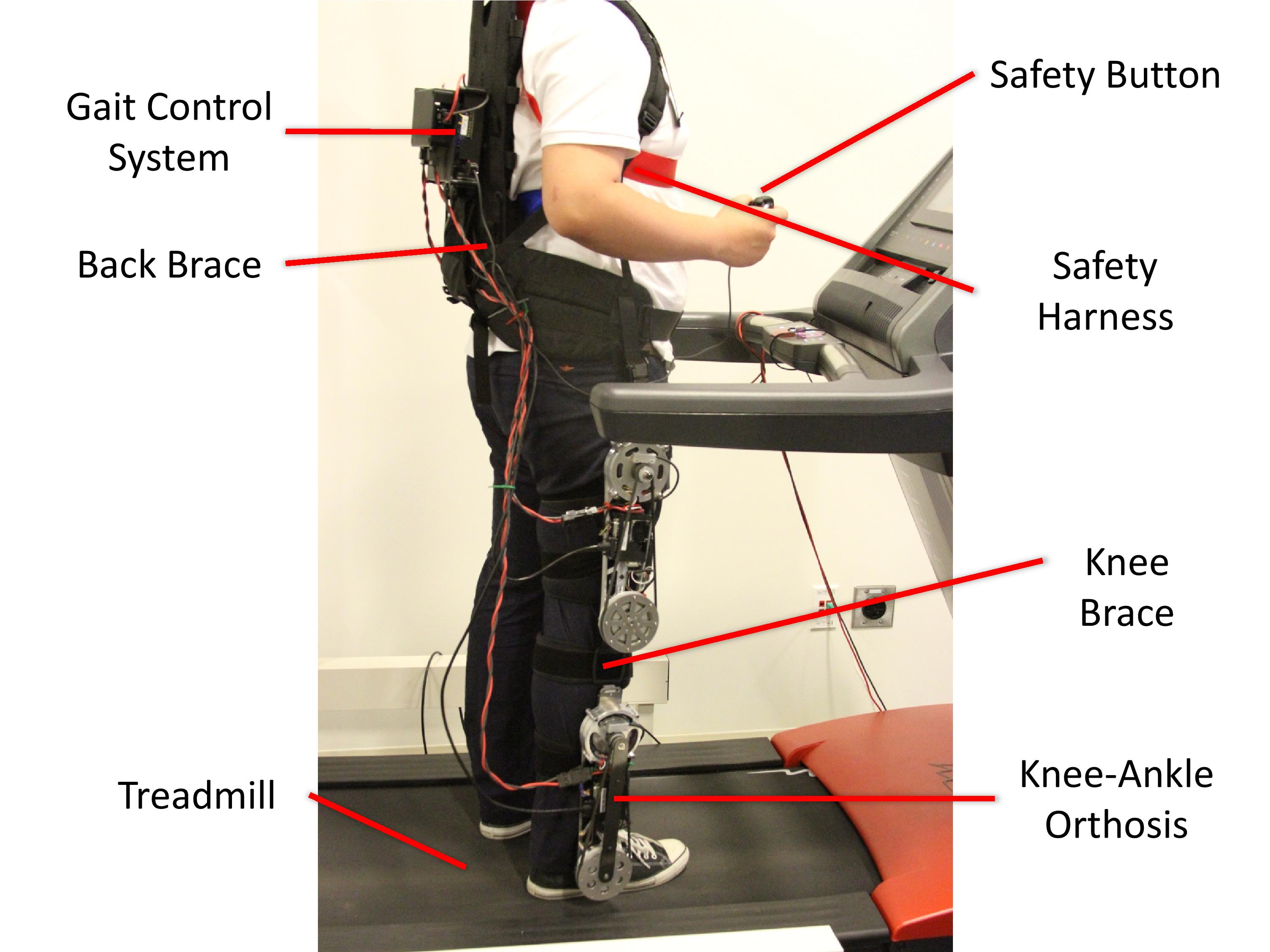
Design and Validation of a Torque Dense, Highly Backdrivable Powered Knee-Ankle Orthosis.
H. Zhu, J. Doan, C. Stence, G. Lv, T. Elery, and R. Gregg. Submitted: IEEE Int. Conf. Robotics & Automation, Singapore, 2017.
Abstract: With an aging population and limited medical resources, a personal mobile lower limb orthosis is desirable for rehabilitation and physical training. High torque output, backdrivability, torque control, and low weight are generally considered to be the core requirements of a rehabilitation orthosis. Currently, Series Elastic Actuators (SEA) or harmonic drives are wide applied in lower limb orthoses to address these requirements. However, they suffer from various limitations, e.g., complex architecture, bulky size, or high cost. In this paper, a low weight, high torque density, simply-structured knee-ankle orthosis is designed and built. By using a high torque density motor and a low ratio distributed transmission, the presented orthosis can achieve a peak joint torque output of 60 Newton-meters with a mass of only 4.58 kilograms. Because the presented orthosis does not use a high ratio transmission, it is intrinsically backdrivable. A human subject walking test demonstrates that the presented orthosis can produce and control a high torque output at a fast walking speed of 2.7 MPH.
More Photos